
MODUL KONTROL PENGEREMAN DENGAN SENSOR FLEKSI
MODUL KONTROL
PENGEREMAN DENGAN SENSOR FLEKSI
Afif Tangguh
Perdana1, Muhammad Abdulhafizh Al-Mu’tashim2, Samuel Beta Kuntarjo3
Jurusan Teknik Elektro,Program Studi D3 Teknik Elektronika
Polteknik Negeri Semarang
Jl. Prof. H. Soedarto, SH., Tembalang, Semarang, Jawa Tengah, Indonesia. 50275.
Telp.(024) 7473417, Website : www.polines .ac.id, email : sekretariat@polines.ac.id
|
Abstrak – Dalam pembelajaran dapat menggunakan
modul sebagai alat untuk mempermudah dalam pembelajaran. Termasuk dalam
mempelajari elektronika, banyak modul yang digunakan untuk mempermudah belajar
tentang elektronika. Dengan ini kami membuat modul kontrol pengereman. Pada
proyek ini dibuat aplikasi ARM NUC120 menggunakan motor dc, dan motor servo.
Sensor fleksi sebagai pemberi resistansi dengan tekukan tertentu agar dapat
terjadi pengereman. Sensor kecepatan digunakan untuk memantau radian
per menit yang ditampilkan pada layar LCD.
Mikrokontroler ARM NUC120 tipe ini memiliki cortex M0 12MHz, 8KB RAM, 64KB
memori program (APROM), 4KB memori data (data flash), 45 pin I/O (GPIO), 8
channel ADC 12 bit, 3 serial UART dengan 1 USB & 1 RS485, 3.3V & 5V,
programmable via USB.
Kata Kunci : ARM NUC120, Motor DC, Motor Servo, Sensor Fleksi, Sensor Kecepatan,
LCD.
Abstract -In learning can use modules as a tool to
facilitate learning. Included in studying electronics, many modules are used to
facilitate learning about electronics. With this we made the braking control
module. In this project the ARM NUC120 application was made using a dc motor
and a servo motor. Flexion sensor as a resistance giver with a certain bend so
that braking can occur. The speed sensor is used to monitor radians per minute
displayed on the LCD screen. This type of ARM NUC120 microcontroller has a 12MHz
MEX cortex, 8KB RAM, 64KB program memory (APROM), 4KB data memory (flash data),
45 pin I / O (GPIO), 8 12 bit ADC channels, 3 serial UARTs with 1 USB & 1
USB & 1 RS485, 3.3V & 5V, programmable via USB.
Keywords:
ARM NUC120, DC Motor, Servo Motor, Flex Sensor, Speed Sensor, LCD.
I. PENDAHULUAN
Kemajuan teknologi saat ini berkembang sangat pesat. Tidak terkecuali dalam
dunia elektronika yang
menggunakan modul-modul
untuk mempermudah alat
elektronika. Misalkan
pada alat pengisian aki otomatis menggunkaan modul sensor tegangan dan modul
sensor arus untuk memantau besar tegangan dan besar arus. Dengan ini kami
membuat modul kontrol pengereman. Sensor fleksi merupakan salah satu komponen
penting untuk memberi resistansi untuk diproses sehingga dapat terjadi
pengereman.
II. TINJAUAN
PUSTAKA
2.1 ARM NUC120
ARM adalah prosesor dengan arsitektur set instruksi 32-bit RISC (Reduced
Instruction Set Computer) yang dikembangkan oleh ARM Holdings. ARM merupakan
singkatan dari Advanced RISC Machine ARM NUC120 merupakan sebuah modul mikronkontroler
32-bit berbasis ARM CortexM0 ARM NUC 120 BOARD dilengkapi dengan program
bootloader sehingga tidak membutuhkan device programmer terpisah NUC120 dapat
beroperasi dengan kecepatan CPU sampai 48MHz Telah dilengkapi dengan Full Speed
USB 2.0 Device Controller yang sangat fleksibel dan dapat dikonfigurasi untuk
berbagai aplikasi berbasis USB (Fauziah, Sukowati, & Purwanto, 2017)

Gambar 2.1 ARM NUC120
2.2 Motor DC
Motor DC adalah suatu perangkat yang mengubah energi listrik
menjadi energi kinetik atau gerakan. Motor DC menghasilkan sejumlah putaran per menit atau
biasanya dikenal dengan istilah RPM dan dapat dibuat berputar searah jarum jam maupun
berlawanan arah jarum jam apabila polaritas listrik yang diberikan pada Motor
DC tersebut dibalikan.
 |
| Gambar 2.2 Motor DC |
2.3 Sensor Fleksi
Sensor fleksi adalah sensor yang berfungsi untuk mendeteksi suatu
kelengkungan, prinsip
kerjanya sama seperti potensio. Untuk menggunakan sensor flex kita membutuhkan rangkaian
pembagi tegangan. Sensor
flex memiliki 2 kaki pin, dengan bentuk fisik tipis memanjang dan lentur.
Sensor ini memiliki output berupa resistansi. Dua pin kaki tersebut, jika salah
satu pin diberikan tegangan sebesar +5 V maka pin yang lainnya sebagai output
serta tegangan 0 Volt. Prinsip kerja sensor flex ini mirip dengan variabel
resistor. Sensor flex memberikan resistansi kepada mikrokontroler melalui
rangkaian pembagi tegangan. Output resistansi ini akan diberikan tegangan yang
nantinya akan dibaca oleh mikrokontroler.

Gambar2.3. Sensor Fleksi
Tabel
2.2. Spesifikasi Sensor Fleksi
Cakupan suhu
|
-35̊Csampai +80̊C
|
Hambatan datar
|
10 KΩ
|
Toleransi hambatan
|
±30%
|
Cakupan hambatan tekukan
|
60K Ω
|
Nilai power
|
0,5 Watt dst.
1 Watt sampai
batas maksimal
|
Rentang
lengkungan kontur
|
45 KΩ –
125 KΩ
|
2.4 Motor Servo
Motor servo adalah sebuah perangkat atau
aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop
tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan
memastikan posisi sudut dari poros output motor. motor servo merupakan
perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan
potensiometer. Serangkaian gear yang melekat pada poros motor DC akan
memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan
potensiometer dengan perubahan resistansinya saat motor berputar berfungsi
sebagai penentu batas posisi putaran poros motor servo. Pada alat ini motor
servo digunakan sebagai media pengereman.
.

Gambar 2.4 Motor Servo
2.5 Sarung Tangan
Sarung tangan adalah sejenis pakaian yang menutupi tangan, baik secara sebagian ataupun secara
keseluruhan. Pada alat ini sensor fleksi akan
ditempelkan pada sarung tangan sebagai media untuk memberi tekukan pada sensor fleksi.

Gambar 2.5 Sarung Tangan
2.6 LED
RGB
LED RGB adalah sebuah LED yang dapat mengeluarkan perpaduan
warna red(merah), green(hijau), dan blue(biru). LED ini seperti LED biasa
memiliki anoda dan katoda hanya saja terdapat 3 anoda pada LED ini mewakili
warna red, green, dan blue. Tegangan yang dikeluarkan pada anoda-anoda inilah
yang akan mempengaruhi warna nyala dari LED RGB. LED rgb termasuk ke dalam
integrated output dan dapat digunakan dengan mengendalikan LED red, green,
blue, dan pin com yang dihubungkan ke gnd Arduino.
 |
| Gambar 2.6 LED RGB |
2.7 LCD
Liquid Crystal Display (LCD) adalah sebuah
peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk
suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen
penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah
elektroda transparan dan 2 buah filter polarisasi (polarizing filter).

Gambar 2.7
LCD
III. PERANCANGAN ELEKTRONIK
3.1 Komponen
Adapun komponen yang
digunakan yaitu:
1.
Mikrokontroler Nuvoton
ARM NUC120
2.
Sensor Fleksi
3.
Motor DC
4.
LCD 16X2
5.
LED RGB
6.
Motor Servo
7.
Baterai 12volt
8.
Rangkaian Driver
9.
Timing Belt
10.
Piringan
3.2 Diagram Blok Sistem

Gambar 3.2 Diagram Blok Sistem
Cara kerja diagrm blok sistem:
Modul Kontrol
Pengereman ini bekerja dengan sensor fleksi yang ditekuk lalu menghasilkan resistansi yang dikirim ke ARM NUC120 untuk diproses.
1.
Apabila potensio diputar ke kanan maka tegangan input masuk ke motor dan
LED hijau akan menyala serta motor berputar, kecepatan motor
dapat diatur menggunakan potensiometer.
2.
Sensor kecepatan akan membaca rotasi per menit (RPM) yang akan ditampilkan
pada LCD
3.
Lalu sensor fleksi ditekuk dan akan menghasilkan resistansi yang digunakan
untuk menggerakkan tuas servo untuk pengereman yang diproses oleh ARM NUC120
4.
Kemudian LED merah akan menyala, dan ketika dilepas LED hijau menyala
kembali
3.3 Diagram Pengawatan

Gambar 3.3 Pengawatan Dalam Kotak

Gambar 3.4 Pengawatan Luar Kotak
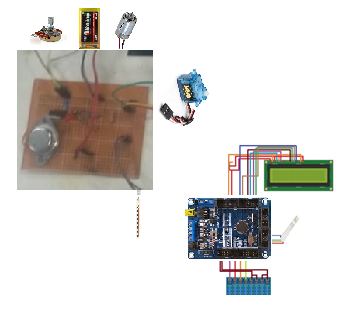
Gambar 3.5
Pengawatan Keseluruhan
3.4 Skematik Rangkaian

Gambar 3.6 Skematik Rangkaian
3.5 Diagram
Alir

Gambar 3.7 Diagram Alir
IV. PERANCANGAN MEKANIK

Gambar 4.1 Gambar alat
V. HASIL PENGUJIAN DATA DAN ANALISA
Terdapat beberapa tahap pengujian yang
dilakukan pada alat yang dibuat. Tahap-tahap tersebut yaitu pengujian perangkat
hardware, pengujian pin-pin yang digunakan.
Pada pengujian awal kami mengatur kecepatan motor dengan menggunakan
driver motor. Sensor kecepatan digunakan untuk mengetauhi RPM yang
ditampilkan pada layar LCD.lalu sensor fleksi yang belumdipasang pada sarung
tangan ditekuk untuk melakukan pengereman yang menggunkan motor servo untuk
medianya.
VI. KESIMPULAN
6.1 Kesimpulan
1. Dengan adanya modul control pengereman ini dapat memantau RPM motor.
2. Penggunaan sensor fleksi untuk mengatur resistansi agar dapat dilakukan pengereman.
6.2 Saran
1. Untuk proyek
selanjutnya dapat dikembangkan lagi dengan memodifikasi Selenoid Valve yang
lebih besar agar botol cepat terisi.
2. Meningkatkan
kemampuan kerja aat agar dapat digunakan untuk mengatur setpoint yang lebih
bervariasi.
VII. DAFTAR PUSTAKA
[1] Rosyidi
Lukman (2014). Pengenalan Pemrograman Mikrokontroller ARM. Yayasan Prasimax
Bina Teknologi. Depok(Januari), https://teknikelektronika.com/pengertian-motor-dc-prinsip-kerja-dc-motor/
http://riyansblog.blogspot.com/2015/08/menggunakan-sensor-flex.html
http://eprints.uny.ac.id/60223/1/Laporan_Affin_15507134002.pdf
http://trikueni-desain-sistem.blogspot.com/2014/03/Pengertian-Motor-Servo.html
https://id.wikipedia.org/wiki/Sarung_tangan






Tidak ada komentar: